🙋About Me
I am a master student of Robotics Institute at Carnegie Mellon University (CMU). Prior to that, I received my bachelor degree from Southern University of Science and Technology (SUSTech), with a major in Robotics Engineering.
📝 Publications
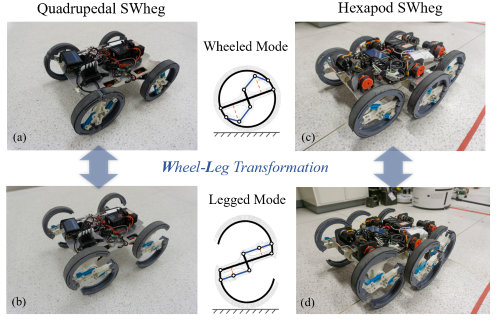
Xiaohan Liu*, Cunxi Dai*, John Z. Zhang, Arun Bishop, Zachary Manchester and Ralph Hollis
[ICRA 2025 Accepted] [project website] [arxiv]
Cunxi Dai*, Xiaohan Liu*, Koushil Sreenath, Zhongyu Li, and Ralph Hollis
[Under Review]

Cunxi Dai, Xiaohan Liu, Jianxiang Zhou, Zhengtao Liu, Zheng Zhu and Zhenzhong Jia, ROBIO 2022
[IEEE]
🤖 Projects
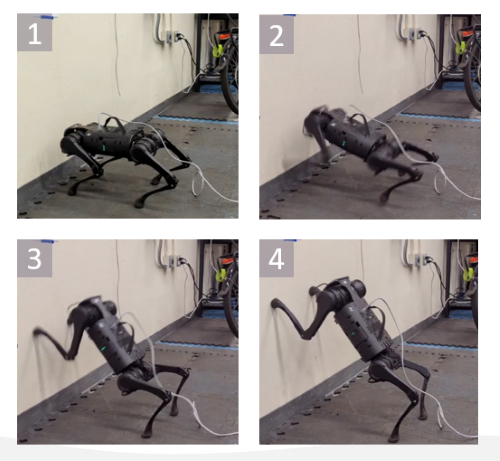
My undergraduate thesis. We trained a controller to make the robot climb, lean on the wall, and use its forelimbs to press a point on the wall.
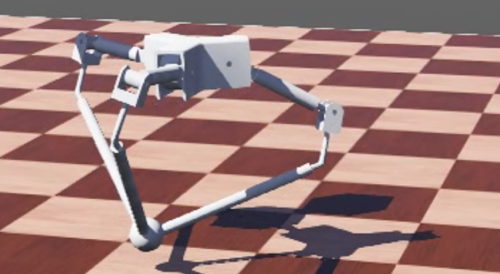
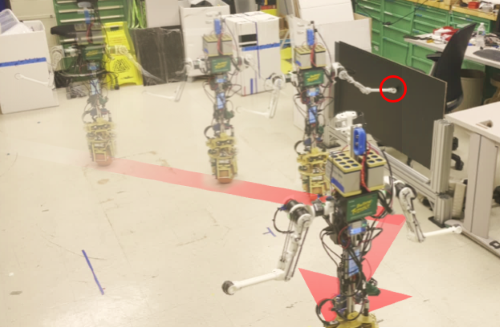
A hopping controller for CMU GOAT robotic leg. The robot can jump in all directions at desired height and velocity when its orientation is constrained.
[video]

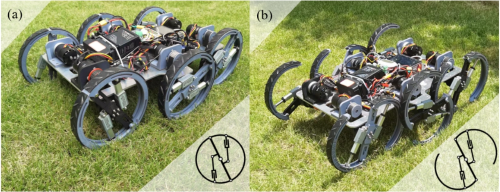
Competition robots designed for Robomaster 2021 season. I was responsible for the embedded system software development.

ROS Interface for Oculus Quest 2 based on the ROS# Unity plugin and Oculus Unity integration.

DND Character, Warforged (quadrupedal), level 7 clockwork sorcerer.
🎖 Honors and Awards
- 2021.08, RoboMaster 2021 University Championship National First Prize(Top 16)
- 2021, The Undergraduate Training Program for Innovation and Entrepreneurship Funding (National level)
- 2023.08, RoboMaster 2023 University Championship National First Prize (Top 16)
📖 Education
- 2023.08 - now, M.S in Robotics, Carnegie Mellon University, Pittsburgh.
- 2019.09 - 2023.06, B.Eng. in Robotics, Southern University of Science and Technology, Shenzhen.